زهرا1365
عضو جدید
برنامه میکروکنترلر
برنامه میکروکنترلر در این پروژه به زبان بیسک است.
همانطور که در برنامه مشاهده می کنید.،سه عدد متغییر m,l,r در اول برنامه معرفی شده اند.،این سه متغییر در خطوط بعدی برنامه توسط پورتهای،portb.1,portb.2 ,portb.3 بارگذاری می شوند.،high یا low شدن این پورتها به صورت مستقیم وابسته به سنسورهای CNY70 است.،در صورت HIGH شدن سنسور وسطی دو موتور HIGH می شوند.،وحرکت خواهند داشت.HIGH یا LOW شدن هر کدام از موتورها سمت راست یا چپ یا هر دو موتور در برنامه کاملا مشخص شده است.
نحوه کار با میکروکنترلر
برای کار با میکروکنترلر احتیاج به دو مرحله دارید.اول کمپایل کردن برنامه ای که به طور مثال با زبان بیسیک نوشته شده.دوم پروگرام کردن آیسی،برای کمپایل کردن میتوانید.ورژن 2.32 این کمپایلر را در خط زیر دانلود کنید.
برای دانلود برنامه کمپایلر بیسیک اینجا را کلیک کنید.
پس از اینکه این فایل فشرده را باز کردید.به مراحلی که راجب نصب گفته شده دقت کنید.تا این برنامه درست نصب شود.
شما می توانید برنامه تان را در محیط edit داس (dos) یا در محیط word یا notpad ویندوز وارد کنید.پس از وارد کردن برنامه بهتره آنرا در محلی که برنامه کمپایلر را نصب کردید وفایل pbp.exe در آن وجود دارد.با پسوندbas ذخیره کنید.pbp مخفف pic basic pro compiler است.برای کمپایل کردن برنامه پیشنهاد میکنم به جای استفاده از محیط ویندوز وارد محیط command بشوید ومسیری که برنامه کمپایلر را در آن ذخیره کردید با استفاده از دستورات dos پیدا کنید.این محیط می بایست شامل فایلpbp.exe باشد.اگر برنامه تان نیز در همین مسیر باشد.احتیاجی به دادن مسیر یا path برنامه ندارید.pbp را تایپ می کنید.بعد از آن با یک فاصله علامت - وسپس بدون فاصله نام میکرو مورد نظر از خانواده PIC را وارد می کنید.حال نام برنامه را وارد کنید پسوند bas آنرا فراموش نکنید.به طور مثال اگر برنامه شما وکمپایلر در مسیری مانند مسیر روبرو قرار گرفته باشند.و اسم برنامه ای که نوشته ای به طور مثال blink با پسوند bas باشد.،داریم. c:\pic\pic1\pbp -16f84a blink.bas در اینجا فرض کردیم میکرو از نوع PIC16F84A است.اگر میکرو PIC16F873 باشد.به جای 16F84A- خواهیم داشت 16F873- اگر برنامه بدون خطا باشد.فایل HEX آن در درایو ی که برنامه در آن قرار دارد.ایجاد می شود.حال می توانید آنرا از طریق پروگرامر وارد میکرو کنید.در پروگرامر نیز نوع میکرو را حتما درست انتخاب کنید.وبه دستورات و نحوه استفاده از پروگرامری که تهیه کرده اید.به دقت توجه کنید.
فیلم مربوط به دو روبات نمونه
متاسفانه من دوربین در اختیار نداشتم تا از روباتی که ساختم برای شما عزیزان فیلم تهیه کنم.به همین خاطر دو فیلمی که مربوط به دو روبات هست.، را از اینترنت پیدا کردم تا شما عزیزان با نحوه کار اینگونه روبات ها بیشتر آشنا بشوید.
sandvich robot
lego robot
مکانیک یک روبات نمونه
همانطور که در شکل مشاهده می کنید.،پس ازلحیم کردن سیم به سر موتورها برای جلوگیری از برخورد سیمها به یکدیگر از وارنیش استفاده شده است.شما می توانید برد الکترونیکی خود را بر روی این روبات نمونه پیاده سازی کنید.
در قسمت جلویی این روبات ، طلقی L شکل را قرار دهید.،و محل پیچ شدن آنرا به روبات با مته 3 سوراخ کنید.، و با سوراخ کردن آن به صورت عرضی به آن قابلیت رگلاژ شدن بدهید.،سپس آنرا با پیچ و مهره 3 به قسمت جلوی روبات متصل کنید.
سنسورهای CNY70 بر روی برد مسی به گونه ای لحیم کنید.،که فاصله اولین سنسور با آخرین سنسور حدود 4.5 سانتی متر باشد.این سنسورها می بایست در وسط یکی از عرضهای برد مسی لحیم شود.سرهای مثبت سنسورهای CNY70 را به یکدیگر لحیم کنید.،سپس این سر مشترک را با سیم به یک سر کانکتور مخابراتی که بر روی برد مسی لحیم شده است.،لحیم کنید.این کار را برای تمامی پایه های سنسورها انجام دهید.،وآنها را به کانکتور مخابراتی دیگری که روی بدنه روبات قرار گرفته متصل کنید.برد مسی را که سنسورها روی آن قرار دارند.،را به زیر طلق L شکل متصل کنید.و با استفاده از کانکتور مخابراتی 7 پین به برد الکترونیکی که بر روی این روبات یا هر روبات دیگر سوار کرده اید.،متصل کنید
در واقع این قسمت کار مسیر یابی روبات شما را انجام میدهد.

برنامه میکروکنترلر در این پروژه به زبان بیسک است.
همانطور که در برنامه مشاهده می کنید.،سه عدد متغییر m,l,r در اول برنامه معرفی شده اند.،این سه متغییر در خطوط بعدی برنامه توسط پورتهای،portb.1,portb.2 ,portb.3 بارگذاری می شوند.،high یا low شدن این پورتها به صورت مستقیم وابسته به سنسورهای CNY70 است.،در صورت HIGH شدن سنسور وسطی دو موتور HIGH می شوند.،وحرکت خواهند داشت.HIGH یا LOW شدن هر کدام از موتورها سمت راست یا چپ یا هر دو موتور در برنامه کاملا مشخص شده است.
1: 2: m var byte 3: l var byte 4: r var byte 5: m=portb.2 6: l=portb.1 7: r=portb.3 8: if m=1 and l=0 and r=0 then 9: high portb.6 10: high portb.7 11: endif 12: if r=0 and l=1 and (m=0 or m=1) then 13: high portb.7 14: low portb.6 15: endif 16: if l=0 and r=1 and (m=0 or m=1) then 17: high portb.6 18: low portb.7 19: endif
نحوه کار با میکروکنترلر
برای کار با میکروکنترلر احتیاج به دو مرحله دارید.اول کمپایل کردن برنامه ای که به طور مثال با زبان بیسیک نوشته شده.دوم پروگرام کردن آیسی،برای کمپایل کردن میتوانید.ورژن 2.32 این کمپایلر را در خط زیر دانلود کنید.
برای دانلود برنامه کمپایلر بیسیک اینجا را کلیک کنید.
پس از اینکه این فایل فشرده را باز کردید.به مراحلی که راجب نصب گفته شده دقت کنید.تا این برنامه درست نصب شود.
شما می توانید برنامه تان را در محیط edit داس (dos) یا در محیط word یا notpad ویندوز وارد کنید.پس از وارد کردن برنامه بهتره آنرا در محلی که برنامه کمپایلر را نصب کردید وفایل pbp.exe در آن وجود دارد.با پسوندbas ذخیره کنید.pbp مخفف pic basic pro compiler است.برای کمپایل کردن برنامه پیشنهاد میکنم به جای استفاده از محیط ویندوز وارد محیط command بشوید ومسیری که برنامه کمپایلر را در آن ذخیره کردید با استفاده از دستورات dos پیدا کنید.این محیط می بایست شامل فایلpbp.exe باشد.اگر برنامه تان نیز در همین مسیر باشد.احتیاجی به دادن مسیر یا path برنامه ندارید.pbp را تایپ می کنید.بعد از آن با یک فاصله علامت - وسپس بدون فاصله نام میکرو مورد نظر از خانواده PIC را وارد می کنید.حال نام برنامه را وارد کنید پسوند bas آنرا فراموش نکنید.به طور مثال اگر برنامه شما وکمپایلر در مسیری مانند مسیر روبرو قرار گرفته باشند.و اسم برنامه ای که نوشته ای به طور مثال blink با پسوند bas باشد.،داریم. c:\pic\pic1\pbp -16f84a blink.bas در اینجا فرض کردیم میکرو از نوع PIC16F84A است.اگر میکرو PIC16F873 باشد.به جای 16F84A- خواهیم داشت 16F873- اگر برنامه بدون خطا باشد.فایل HEX آن در درایو ی که برنامه در آن قرار دارد.ایجاد می شود.حال می توانید آنرا از طریق پروگرامر وارد میکرو کنید.در پروگرامر نیز نوع میکرو را حتما درست انتخاب کنید.وبه دستورات و نحوه استفاده از پروگرامری که تهیه کرده اید.به دقت توجه کنید.
فیلم مربوط به دو روبات نمونه
متاسفانه من دوربین در اختیار نداشتم تا از روباتی که ساختم برای شما عزیزان فیلم تهیه کنم.به همین خاطر دو فیلمی که مربوط به دو روبات هست.، را از اینترنت پیدا کردم تا شما عزیزان با نحوه کار اینگونه روبات ها بیشتر آشنا بشوید.
sandvich robot
lego robot
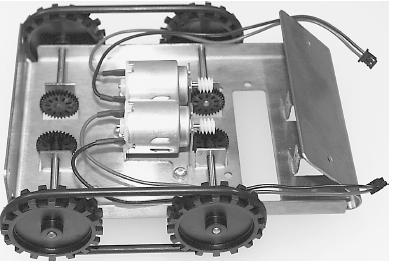
مکانیک یک روبات نمونه
همانطور که در شکل مشاهده می کنید.،پس ازلحیم کردن سیم به سر موتورها برای جلوگیری از برخورد سیمها به یکدیگر از وارنیش استفاده شده است.شما می توانید برد الکترونیکی خود را بر روی این روبات نمونه پیاده سازی کنید.
در قسمت جلویی این روبات ، طلقی L شکل را قرار دهید.،و محل پیچ شدن آنرا به روبات با مته 3 سوراخ کنید.، و با سوراخ کردن آن به صورت عرضی به آن قابلیت رگلاژ شدن بدهید.،سپس آنرا با پیچ و مهره 3 به قسمت جلوی روبات متصل کنید.
سنسورهای CNY70 بر روی برد مسی به گونه ای لحیم کنید.،که فاصله اولین سنسور با آخرین سنسور حدود 4.5 سانتی متر باشد.این سنسورها می بایست در وسط یکی از عرضهای برد مسی لحیم شود.سرهای مثبت سنسورهای CNY70 را به یکدیگر لحیم کنید.،سپس این سر مشترک را با سیم به یک سر کانکتور مخابراتی که بر روی برد مسی لحیم شده است.،لحیم کنید.این کار را برای تمامی پایه های سنسورها انجام دهید.،وآنها را به کانکتور مخابراتی دیگری که روی بدنه روبات قرار گرفته متصل کنید.برد مسی را که سنسورها روی آن قرار دارند.،را به زیر طلق L شکل متصل کنید.و با استفاده از کانکتور مخابراتی 7 پین به برد الکترونیکی که بر روی این روبات یا هر روبات دیگر سوار کرده اید.،متصل کنید
در واقع این قسمت کار مسیر یابی روبات شما را انجام میدهد.
")